173-0671-8932
173-0671-8932 
产品中心
Product Center
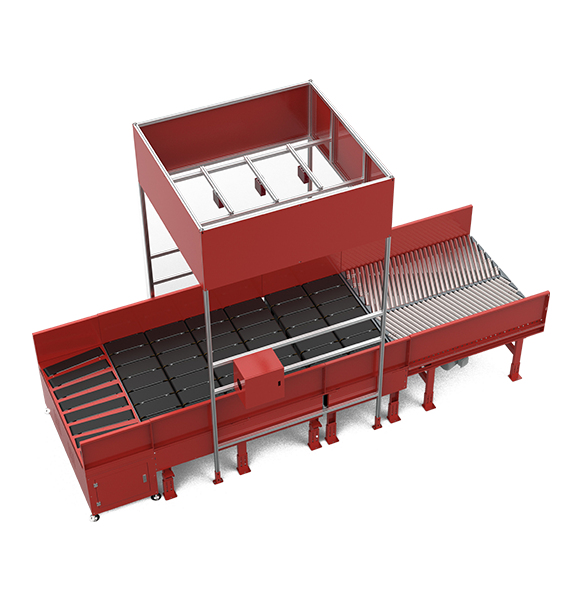
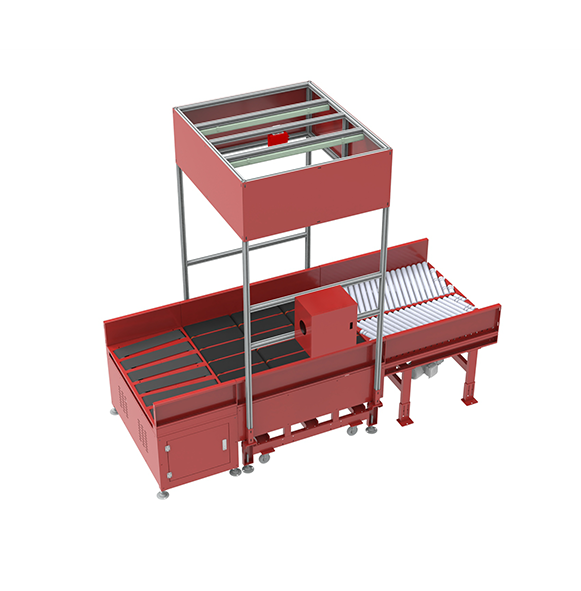
快递版单件分离
功能介绍:基于视觉的单件分离解决方案旨在通过一个或多个3D视觉相机,识别包裹位置,结合上位机位置分离算法,控制小车传送带速度,从而将批量并排的包裹变成整齐的“阵型”,配合大型自动分拣设备,实现全自动传输和分拣,顺利完成订单处理,进一步提高分拣效率;该方案通常前端搭载分散单元,后端配合居中机使用,将前端无序的包裹有序居中输送至下级模块。
- 产品:快递版单件分离


产品介绍
产品特性:
 本产品适用于快递转运中心,支持大小纸箱、软包、蛇皮袋等多种包裹类型;
本产品适用于快递转运中心,支持大小纸箱、软包、蛇皮袋等多种包裹类型;
基于双目视觉技术,结合高精度位置分离算法,快速准确定位包裹,精度为5mm,包裹输出间距可调,执行单元速度可调;
主体采用模块化设计,每个模组可独立安装,拆卸,维修;每条皮带独立驱动;
支持直通模式和分离模式,直通模式下允许货物以任何状态快速通过。
本产品适用于快递转运中心,支持大小纸箱、软包、蛇皮袋等多种包裹类型; 基于双目视觉技术,结合高精度位置分离算法,快速准确定位包裹,精度为5mm,包裹输出间距可调,执行单元速度可调; 主体采用模块化设计,每个模组可独立安装,拆卸,维修;每条皮带独立驱动; 支持直通模式和分离模式,直通模式下允许货物以任何状态快速通过。产品尺寸:
总体:5140*1800*3167mm(长*宽*高)
分散单元:长700mm
单件分离主体:长2760mm
居中单元:长1680mm
工作高度:750mm
总体:5140*1800*3167mm(长*宽*高) 分散单元:长700mm 单件分离主体:长2760mm 居中单元:长1680mm 工作高度:750mm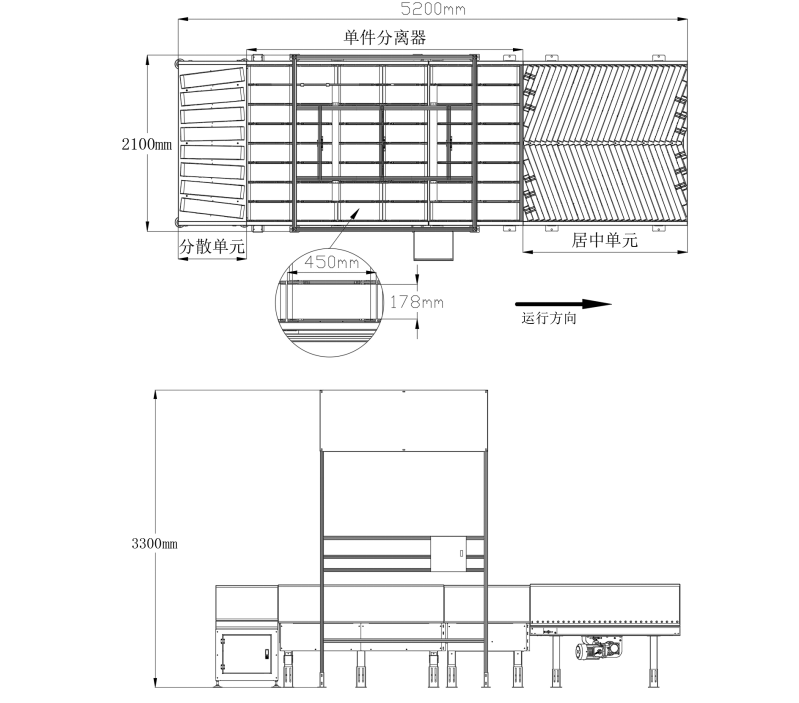
技术参数:
| 项目 | 技术参数 |
| 视觉系统 | 3D工业相机 |
| 应用软件 | 单件分离软件系统 |
| 分拣货物尺寸 (L*W*H) | 最大尺寸:1200*800*700 mm 最小尺寸:150*150*50mm |
| 最大货物重量 | 60kg |
| 执行单元数量 | 48(6列8行) |
| 总功率 | 15KW |
| 输送线速度 | 0-2m/s可调节 |
| 工作温度 | -10-50°C |
| 供电 | 380V |
| 供电 | 220v |
| 效率(件/小时) | 4500-5500 |
| 分离成功率 | ≥99% |
| 应用模式 | 1.配合狂扫和摆轮做出货口分拣 2.配合DWS和摆轮做卸货口分拣 |
产品核心件:
| 名称 | 说明 | 品牌 |
| 相机 | 3D工业相机 | 星程吉月 |
| 工控机 | I5及以上 | 华北工控 |
| 可编程逻辑控制器 | EtherCat通讯 | 星程吉月 |
| 伺服驱动器 | 400W | 星程吉月 |
| 伺服电机 | 400W | 星程吉月 |
热销推荐